PippoGi Di introduzione molto recente, ma non su scala globale. In questo modo si è potuto ridurre notevolmente il distanziamento e migliorare le rotte, ad esempio nei voli tra Europa e America, consentendo anche l'ampliamento degli slot.
EDIT:
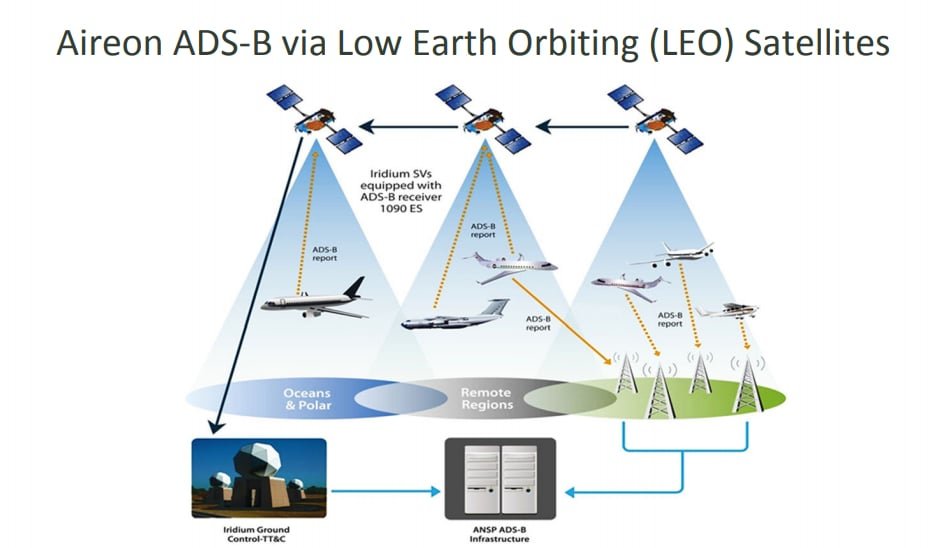
questo può aiutare a capire come funziona, fonte.
In assenza di tali sistemi si utilizza il Time Procedural Separation, ovvero ogni aereo che viaggia sull'oceano deve entrare in un certo punto geografico ad un orario prestabilito ed ad una certa velocità, al fine di essere nel waypoint successivo ad un certo orario stabilito e così via; in questo modo conoscendo l'orario in cui si deve essere nei vari checkpoint confrontandolo con quello reale si garantisce la separazione da quello davanti e da quello dietro. La separazione verticale, invece, si attua su quote diverse a seconda della direzione e varia a seconda dell'area che si sorvola e dal tipo di aeromobile utilizzato (non è sempre possibile utilizzare la RVSM di 1000 piedi, perciò si passa a 2000 piedi).